

Teja Koripella
Class of 2024Sammamish, WA
About
Projects
- "Developing and Simulating a Novel Radon Gas Leak Pinpointing Ackermann Drive Robot Using OpenMC, Geiger Counters, and ROS" with mentor Soha (Sept. 22, 2023)
Project Portfolio
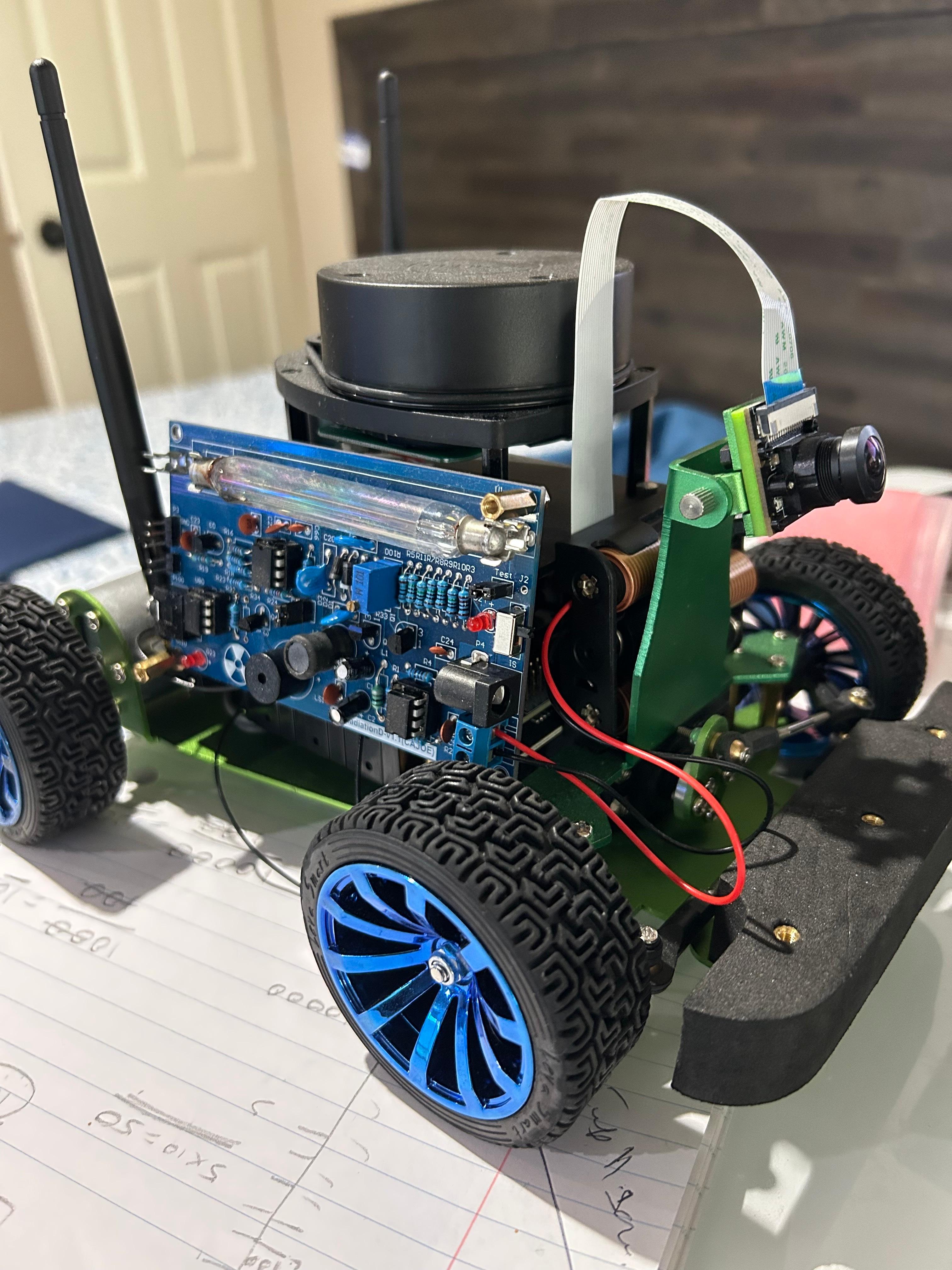
Developing and Simulating a Novel Radon Gas Leak Pinpointing Ackermann Drive Robot Using OpenMC, Geiger Counters, and ROS
Started May 25, 2023
Abstract or project description
As determined by Princeton’s Science and Global Security Department, neutron sources can be reliably traced back to their source utilizing a Multi-Armed-Bandit (MAB) based reinforcement learning algorithm. In this paper I will discuss the construction, programming, simulation, and testing of a novel approach to pinpointing and classifying gamma sources autonomously and determine its viability for tracking sources of radon gas leaks. Radon gas is a dangerous and common alpha emitter, claiming the lives of 20,000 people yearly. Since the most common isotope of Radon, Rn-222, decays into the gamma-emitters Bi-214 and Pb-214 in 46.7 minutes via transient equilibrium, I utilize Bateman’s equation to model radon exposure levels from its progeny using OpenMC. The environment consisted of a 1.3 MeV isotropic source comprised of Rn-222’s progeny along with a 100 KeV directional source of Cs-137, 100 feet from 4 Geiger-Müller (GM) tubes representing the frame of the robot, where I ran the pulse-height and flux tallies to calculate the estimated confidence interval. The algorithm used to translate the robot throughout the simulation relied on RRT-SLAM and Thompson-sampling algorithm (Thompson-Sampling is a MAB solution) which utilized reward from CPS recorded from the GM. The results from the simulation from this study were especially promising regardless of its low 63.8% isotope confidence interval (confidence that the located isotope was Rn-222) due to a remarkable a prediction error of 1.36 feet (algorithm prediction error from true radon location).